被写界深度拡大カメラ
被写界深度拡大カメラとは
被写界深度とは、撮影画像の焦点が合っているように見える被写体の距離の範囲のことをさします。被写界深度拡大カメラは、解像度と明るさを犠牲にすることなく被写界深度を拡大するカメラで、レンズとの距離や角度などを調整することなく被写体を明瞭に撮影することができます。これまで複数のカメラを設置する必要があったシーンや、フォーカスを合わせなおす必要があったシーンも、一度に1台で撮影できる範囲が広がります。フォーカス調整の部品が不要なため安定性と信頼性に優れ、かつ小型のマシンビジョン環境を実現することができ、FA(ファクトリーオートメーション)、物流、セキュリティ、パーソナルなどさまざまな分野での応用が可能です。
被写界深度と明るさとが共存するリコーの被写界深度拡大カメラ
リコーの被写界深度拡大カメラは、専用レンズと画像処理内蔵の専用カメラから構成されています。一般的なカメラでは、絞りを絞ることにより被写界深度を伸ばせますが、画像が暗くなってしまいます。本カメラでは、明るさを維持したまま被写界深度を伸ばすことができます。専用に設計された特殊なレンズとカメラ本体に内蔵されたICによる画像処理の組み合わせで、このような機能を実現しています。
被写界深度拡大カメラの適用例
利用シーン 1.手前と奥にある被写体撮影
これまで、手前と奥の被写体を撮影するために複数のカメラを使用したり、カメラの位置を移動させていたケースに対して、フォーカス調整なしで手前と奥の両方にピントを合わせることが可能となります。これにより、QRコード認識、ラインを流れる物体認識などに適用できます。
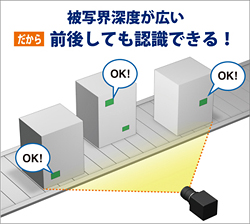 図1:奥行きの違いがある被写体撮影での利用イメージ
図1:奥行きの違いがある被写体撮影での利用イメージ
 従来カメラの撮影結果
従来カメラの撮影結果
手前のQRコードが認識できない
 被写界深度拡大カメラの撮影結果
被写界深度拡大カメラの撮影結果
手前と奥の両方のQRコード認識ができる
図2:従来カメラと被写界深度拡大カメラでの撮影画像の比較
利用シーン 2.斜めの被写体撮影
これまで、斜めの被写体に対して、複数のカメラを使用したり、カメラのピント調整を行う必要のあったシーンに対して、フォーカス調整なしで手前から奥側にピントが合わせられるようになります。これにより、これまで手前と奥側で複数撮影を行った後に、複数画像をつなぎ合わせていた作業などが不要となり、1ショットで手前から奥側までの情報が撮影できます。OCRや基板検査などに適用できます。
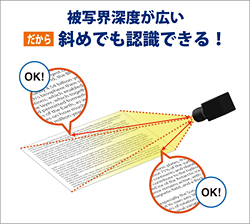 図3:斜めの被写体撮影での利用イメージ
図3:斜めの被写体撮影での利用イメージ
 従来カメラの撮影結果
従来カメラの撮影結果
50ピンコネクタの手前側のピンがボケている
手前側の部品名がボケている
 被写界深度拡大カメラの撮影結果
被写界深度拡大カメラの撮影結果
50ピンコネクタおよび基板上に記載された部品名が
従来カメラに比べてピントが合っている
図4:従来カメラと被写界深度拡大カメラでの撮影画像の比較
利用シーン 3.高さや深さの異なる被写体撮影
これまでは、高さや深さの異なる被写体に対して、複数のカメラを使用したり、カメラの高さ位置を移動させて撮影をしていました。これに対して、リコーの被写界深度拡大カメラでは、フォーカス調整なしで高さや深さの異なる複数の被写体にピントを合わせることが可能となります。高さや深さの異なる製品が流れるラインの物体認識や、印刷物を積み重ねていくような工程での画像認識などに適用できます。
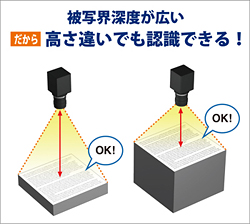 図5:高さの異なる被写体撮影での利用イメージ
図5:高さの異なる被写体撮影での利用イメージ
図6のように缶の内側全体を撮影するようなことも可能です。
 撮影時の様子(缶とカメラを横から見た図)
撮影時の様子(缶とカメラを横から見た図)
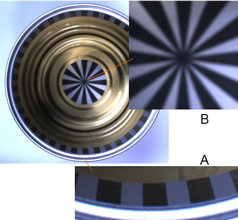 従来カメラの撮影結果
従来カメラの撮影結果
缶の内側を撮影する場合、手前(缶のふち)に
ピントが合い、奥(缶の底)がピンボケしている
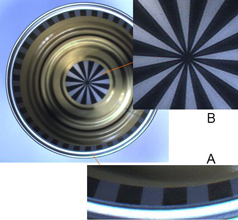 被写界深度拡大カメラの撮影結果
被写界深度拡大カメラの撮影結果
缶の内側の手前から奥までピントが合っている
図6:従来カメラと被写界深度拡大カメラでの撮影画像の比較
本技術の分類:分野別「マシンビジョン」