ステレオカメラ
光学技術、画像処理技術、実装技術を結集したリコーのステレオカメラ
一般的に、ステレオカメラとは、左右に並べられた2台のカメラの視差情報を利用して、前方の対象物の奥行き情報が得られるカメラのことをさします。
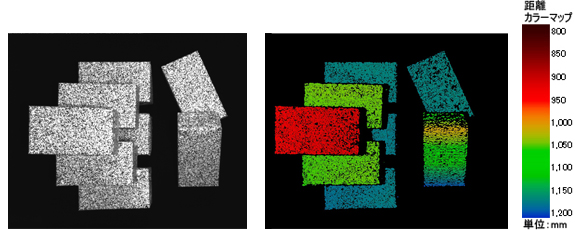 図1:ステレオカメラによるモノクロ輝度画像(左)と距離画像(右)*の例
図1:ステレオカメラによるモノクロ輝度画像(左)と距離画像(右)*の例
(* 被写体までの距離を色の違いで表しています。)
ステレオカメラの精度を高めるためには、2つのカメラの光学的な歪みや機械的な組み付けなどによって発生するズレを補正し、かつ2つのカメラを平行等位状態にする必要があります。リコーは、今まで蓄積してきた、高精度に光学特性を評価する光学技術、その光学特性を正確に補正する画像処理技術、そして高精度に組み付けを行う実装技術を結集することで、独自のキャリブレーションシステムを構築し、従来にはないステレオカメラの高精度化を実現しました。また、画像処理と視差演算処理を、全てステレオカメラ内部に最適な形でハードウェア化したことで、高精度な三次元出力をリアルタイム、かつ高速に出力することができます。
産業用ステレオカメラ
物流、建設、土木などの産業分野では安全・自動化のニーズが加速しており、カメラなどのセンサーにより周囲の環境を検知する必要性がますます高まっています。リコーのステレオカメラでは、システム構築可能な精度と速度を確保した汎用性の高い三次元ビジョンを提供することで、お客様の困りごとの解決に貢献します。
 図2:産業用ステレオカメラ
図2:産業用ステレオカメラ
適用例
利用シーン1 フォークリフト用ステレオカメラ
人と物が混在するフォークリフトの作業現場において、周辺の障害物の中からステレオカメラが人、物を立体的にとらえ、高精度で検知し、車両と人・物の接触事故の発生抑制に貢献します。広角化技術により水平角130°という広範囲の検知を実現。さらに3次元をベースとした認識技術により、従来の作業者にタグを携帯させ検知する方式とは異なり、不特定多数の人に対してタグ携帯なしでの検知ができます。画像処理・電源機能をカメラ内に実装することで小型化、ワンパッケージ化を実現し、取り付けや運用も容易になり、現場で稼働している既販のフォークリフトへの装着も可能です。
 図3:フォークリフト装着イメージ
図3:フォークリフト装着イメージ
利用シーン2 クレーン作業安全支援システム
これまで主に誘導員による目視で対応していた、クレーン作業の現場における安全確認を、デジタル技術で支援します。本ステレオカメラ技術に加え、AI認識技術を活用することにより、吊り荷と作業者を自動検出してその位置関係を立体的に測定できます。測定結果をもとに衝突の危険性を検知し、クレーン操縦者に知らせることで衝突事故を防ぐ仕組みで、建設、土木、製造業をはじめとする、作業の安全性に課題を抱えるさまざまな現場での活用が期待されています。
 図4:「クレーン作業安全支援システム」イメージ
図4:「クレーン作業安全支援システム」イメージ